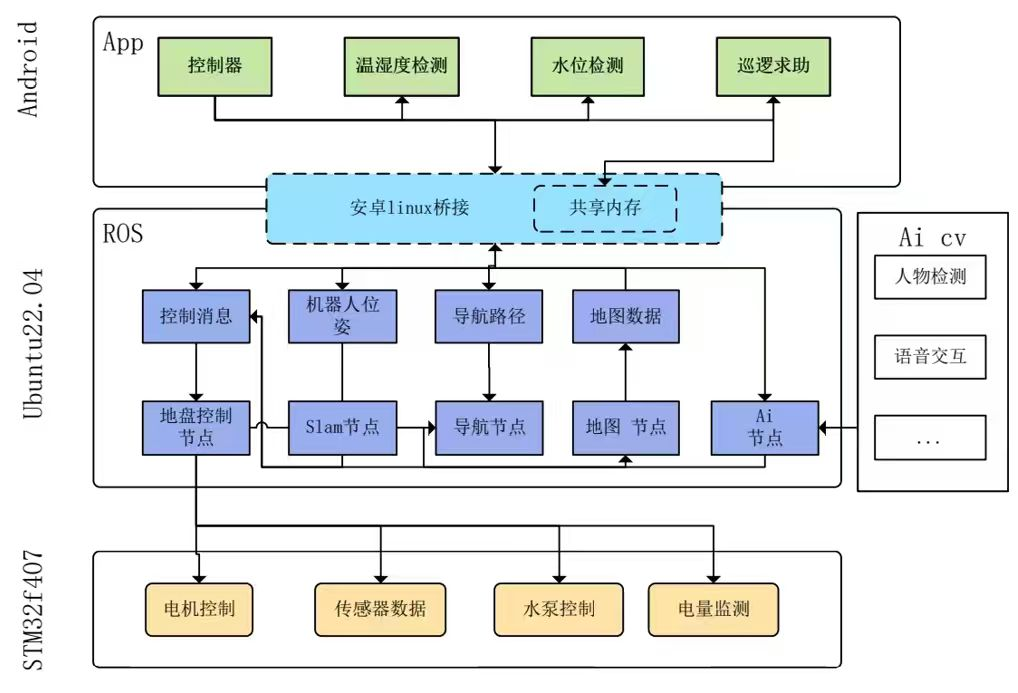
- 本项目基于思岚 RPLIDAR A1 激光雷达,使用 Gmapping 进行 2D SLAM 建图,并通过 ROS Navigation Stack 实现全局/局部规划与 AMCL 粒子滤波定位的自主导航。项目包含:
- 雷达驱动与 TF 配置
- Gmapping 参数优化与地图保存
- AMCL 定位与导航(全局/局部路径规划)
- YOLO 人体识别(融合视觉与雷达/里程计,支持跟随/到人)
- 语音交互导航(语音设定目标点、启停、模式切换与状态播报)
- 可即用的启动脚本与参数模板,帮助快速部署到实际机器人
- ROS相关环境配置及依赖安装见相关文档
- YOLO相关环境配置及依赖安装见相关文档
- 语音1交互相关环境配置及依赖安装见相关文档
- 语音2交互功能相关环境配置及依赖安装见相关文档
- STM32相关环境配置与原理图见相关文档
